Social and Cultural Barriers to Widespread Robot Adoption
The industry has a habit of treating robotics as a pure engineering problem. We obsess over torque density, latency in the control loop, and the teraflops of the onboard NPU, assuming that if the machine can perform the task, the deployment is a solved equation. The reality is far messier: we are hitting a wall where technical capability is no longer the primary bottleneck. The real friction is social, cultural, and aesthetic.
The Tech TL;DR:
- The Adoption Gap: Widespread robotics rollout is stalled not by hardware failure, but by social and cultural resistance to robotic aesthetics and integration.
- Sector-Specific Friction: Humanoid robots in automotive factories and rehabilitation robotics in clinical settings face significant non-technical barriers to scaling.
- Macro-Economic Blockers: Beyond design, geopolitical factors like tariffs are actively restricting the flow of necessary hardware into production pipelines.
For years, the narrative in Silicon Valley and the manufacturing hubs of Asia has been that the “last mile” of robotics is a software challenge. We believed that better SLAM algorithms or more robust LLM-driven reasoning would unlock the factory floor. However, as noted in recent findings from Nature, the barriers to adoption often stem from the human-centered dimensions of the system. When a humanoid robot enters a carmaker’s factory, the engineers aren’t just fighting jitter or power consumption; they are fighting the psychological and cultural inertia of a workforce that perceives the machine as an alien entity rather than a tool.
The Aesthetics Bottleneck in Production
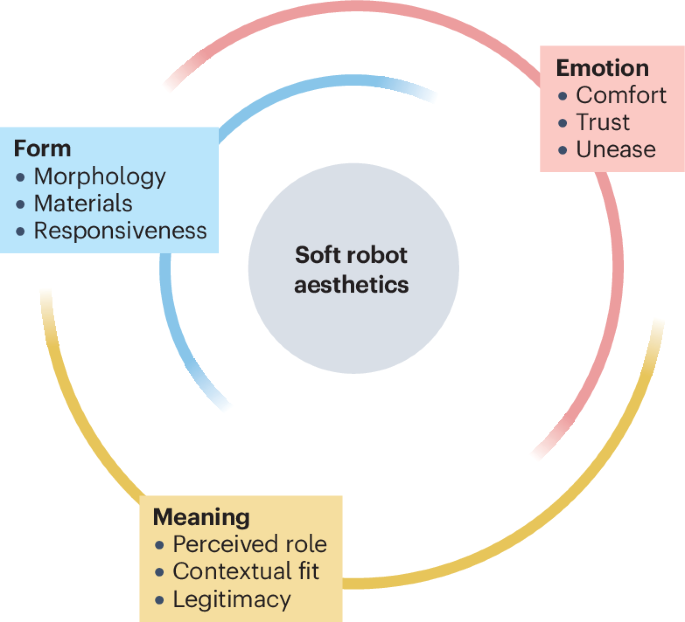
In the automotive sector, the deployment of humanoid robots has transitioned from a theoretical curiosity to a production reality, yet wider adoption remains sluggish. The technical specs—degrees of freedom, battery life, and actuator precision—are often sufficient for the tasks at hand. The failure point is the interface between the machine’s form and the human operator’s comfort. What we have is not “industrial design” in the sense of making a product look sleek for a keynote; We see a fundamental requirement for operational stability. If the workforce views the robot as a cultural intruder or an uncanny presence, the resulting friction manifests as lower productivity and higher resistance to integration.

This social-technical debt is a critical risk for enterprises. When a rollout fails due to cultural misalignment, the sunk cost in hardware is staggering. To mitigate this, companies are increasingly relying on robotics integration consultants who can bridge the gap between raw mechanical capability and the social requirements of the shop floor.
Clinical Friction and the Rehabilitation Stack
The medical field provides a stark example of this tension. The “Fit for Medical Robotics Initiative” has highlighted that rehabilitation robotics and allied digital technologies face steep hurdles in clinical implementation. In a hospital environment, the “aesthetic” of a robot includes its noise profile, its perceived safety, and how it fits into the existing clinical workflow. A robot that is technically superior in providing physical therapy but is perceived as intimidating or cumbersome by the patient will never see widespread clinical adoption.
The solution isn’t more sensors; it is a shift toward human-centered design where aesthetics are treated as a core technical dimension. This requires a tight feedback loop between clinical practitioners and industrial design agencies to ensure the hardware doesn’t trigger a “flight or fight” response in the very patients it is meant to help.
The Macro-Economic Layer: Tariffs and Hardware Access
While design and culture are the internal barriers, external geopolitical pressures are creating a hardware vacuum. The imposition of tariffs on critical machinery is effectively blocking the tools required to iterate on these human-centered systems. When the cost of importing a specialized actuator or a precision sensor spikes due to trade policy, the iteration cycle slows. Developers cannot prototype the “aesthetic” or “social” refinements needed for adoption because they are struggling to secure the base hardware.
This supply chain volatility forces firms to reconsider their sourcing strategies. Many are now deploying supply chain auditors to uncover alternative vendors or restructure their procurement pipelines to avoid the tariff-induced bottlenecks that are stalling the next generation of robotic deployment.
The Implementation Matrix: Technical Efficiency vs. Human-Centred Design
To understand why “better specs” don’t equal “better adoption,” we have to look at the trade-offs between a pure engineering approach and a human-centered approach.
| Dimension | Pure Technical Approach | Human-Centred Approach | Impact on Adoption |
|---|---|---|---|
| Primary Goal | Maximum Throughput/Precision | User Acceptance/Integration | High (Reduces cultural friction) |
| Design Priority | Optimized SoC/Actuator Density | Aesthetics, Ergonomics, HRI | Critical (Avoids the “Uncanny Valley”) |
| Failure Mode | Hardware Breakdown/Latency | User Rejection/Social Friction | Systemic (Causes total rollout failure) |
| KPIs | MTBF, Cycle Time, Teraflops | User Trust, Ease of Interaction | Operational (Determines actual usage) |
From a developer’s perspective, integrating these “soft” dimensions into the technical stack requires treating human-robot interaction (HRI) as a set of configurable parameters. Instead of hard-coding behaviors, the system must allow for aesthetic and social tuning based on the deployment environment.
// Example HRI Configuration for Social-Technical Alignment { "robot_id": "humanoid_v4_prod", "deployment_zone": "automotive_assembly_line", "hri_parameters": { "movement_smoothing": 0.85, // Reduce jerky motions to lower operator anxiety "visual_feedback_mode": "ambient_soft", // Avoid harsh flashing LEDs "proximity_buffer": "1.2m", // Respect personal space boundaries "interaction_latency_target": "150ms", // Maintain natural conversational pacing "aesthetic_profile": "non_threatening_industrial" }, "cultural_override": { "region": "EU_West", "compliance": "SOC2_Robotics_Standard" } }The goal here is to move away from the “black box” approach to robotics. By exposing these parameters to the users and the designers, we can treat the social barrier as a bug that can be patched rather than an insurmountable wall.
the trajectory of robotics will not be decided by who has the fastest processor or the most precise arm. It will be decided by who can successfully navigate the social and cultural architecture of the human environment. The companies that continue to ignore aesthetics in favor of raw specs are simply building expensive paperweights. The real innovation is happening at the intersection of mechanical engineering and behavioral psychology, and that is where the next production push will be won.
Disclaimer: The technical analyses and security protocols detailed in this article are for informational purposes only. Always consult with certified IT and cybersecurity professionals before altering enterprise networks or handling sensitive data.