featured

End of an era: AA Gent will soon say goodbye to Hein Vanhaezebrouck
Don’t hesitate: at the end of this season, AA Gent and trainer Hein Vanhaezebrouck will part ways. That has now been established. We will only wait until after the competition to officially announce this. If …




End of an era: AA Gent will soon say goodbye to Hein Vanhaezebrouck
Don’t hesitate: at the end of this season, AA Gent and trainer Hein Vanhaezebrouck will part ways. That … Read more
From dead chickens to diapers and wood waste in organic waste containers: “We are going to check incorrect sorters more strictly” (Sint-Niklaas)
People have already put vacuum cleaner bags, plastic bags and even a dead chicken in the organic waste … Read more
«Нас ждет тяжелый период, но Украина не проиграет». Интервью главы ГУР Кирилла Буданова Би-би-си
О статье Автор, Оксана Тороп Должность, Украинская служба Би-би-си 22 апреля 2024 Кирилл Буданов — самый публичный руководитель … Read more
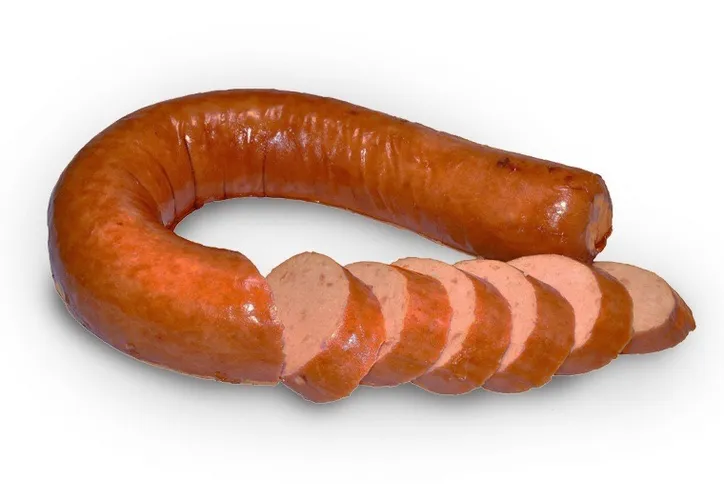
How unhealthy is smoked sausage
The smoked sausage is under fire. Because although the name suggests otherwise, these sausages have not been smoked … Read more

After Inter and Bayer: Tracking the remaining championship races
Inter today (Monday) completed a tremendous win in the Scudetto and thus it was decided – out of … Read more